Abstract
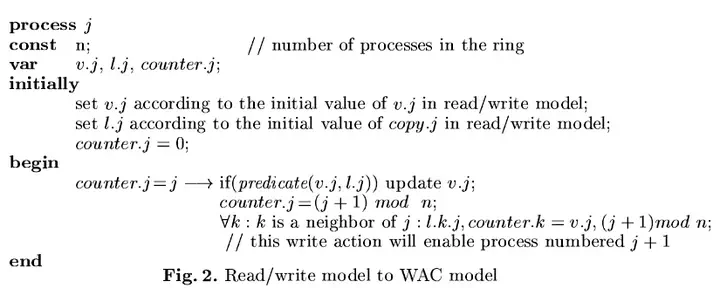
In this paper, we consider a new atomicity model, write all with collision (WAC), and compare it with existing models considered in the literature. This model captures the computations in sensor networks. We show that it is possible to transform a program from WAC model into a program in read/write model, and vice versa. Further, we show that the transformation from WAC model to read/write model is stabilization preserving, and the transformation from read/write model to WAC model is stabilization preserving for timed systems. In the transformation from read/write model to WAC model, if the system is untimed (asynchronous) and processes are deterministic then under reasonable assumptions, we show that (1) the resulting program in WAC model can allow at most one process to execute, and (2) the resulting program in WAC model cannot be stabilizing. In other words, if a deterministic program cannot read then it is important that it can tell time.
Mahesh Arumugam
Mahesh Arumugam is a software engineer passionate about designing, programming, and deploying systems. Currently, I work in data security and analytics domain.